AI-ASSISTED AGRICULTURE & ROBOTIC SYSTEMS
Snipit: Gentle Fruit Harvesting System
STATUS
MVP Validated - Ready for Phase 2 Deployment
TEAM
Gregory Wong, Tibault Dary-Alabaster, Aathavan Senthilkumar, Yichen Yuan
SYSTEM OVERVIEW
Snipit is a gentle, affordable harvesting system designed for small fruit farmers working with delicate crops. The problem: fruits like raspberries, grapes, and blueberries are fragile, yet harvesting them at scale requires precision, adaptability, and reliability that neither expensive industrial robots nor manual labor can reliably provide. After four months of research including farmer interviews, industry expert consultations, and field observations, we discovered the core gap: small fruit farmers lose 10-20% of their produce annually ($500-$2,000 per acre) because existing solutions are either too rigid (industrial machines) or too labor-dependent (manual picking). Snipit combines a cut-and-hold mechanism with lightweight sensing and ripeness prediction powered by custom machine learning models.
MY CONTRIBUTIONS
- 01
Led technical architecture, defining how sensing, prediction, and actuation integrate into a cohesive workflow. Designed the system decision flow: the logic guiding hardware through detecting fruits, predicting ripeness, and executing precise harvests.
- 02
Built and trained core ripeness prediction models enabling adaptive harvesting using YOLOv8 nano for real-time fruit detection and localization. Leveraged open-source Kaggle datasets for quick model training while maintaining adaptability across different fruit varieties and lighting conditions. Integrated moisture sensing data for ripeness confirmation on lightweight embedded hardware.
- 03
Contributed to concept evaluation and selection alongside the design team. Participated in brainstorming, prototyped interaction flows, and validated that ML-powered decision logic translated into hardware farmers could realistically operate and trust.
- 04
Synthesized research findings from farmer interviews, field observations, and competitive analysis into technical requirements. Identified that the real bottleneck wasn't just the gripper but the lack of systems sensing context and making adaptive decisions.
RESULTS
Successfully trained YOLOv8 nano models achieving >85% accuracy across tomato and cherry datasets with stable performance in variable lighting and occlusion
Designed and implemented system decision workflow with sub-second inference latency on embedded hardware
Validated proof-of-concept on physical prototype demonstrating reliable fruit detection and moisture-based ripeness confirmation
Conducted 4 farmer interviews + 2 industry professional interviews + 1 technical expert consultation
Generated and evaluated 40+ design concepts through rapid sketching and AI-assisted ideation
Established foundation for AI-assisted agricultural automation with demonstrated human-in-the-loop approach
PROJECT GALLERY
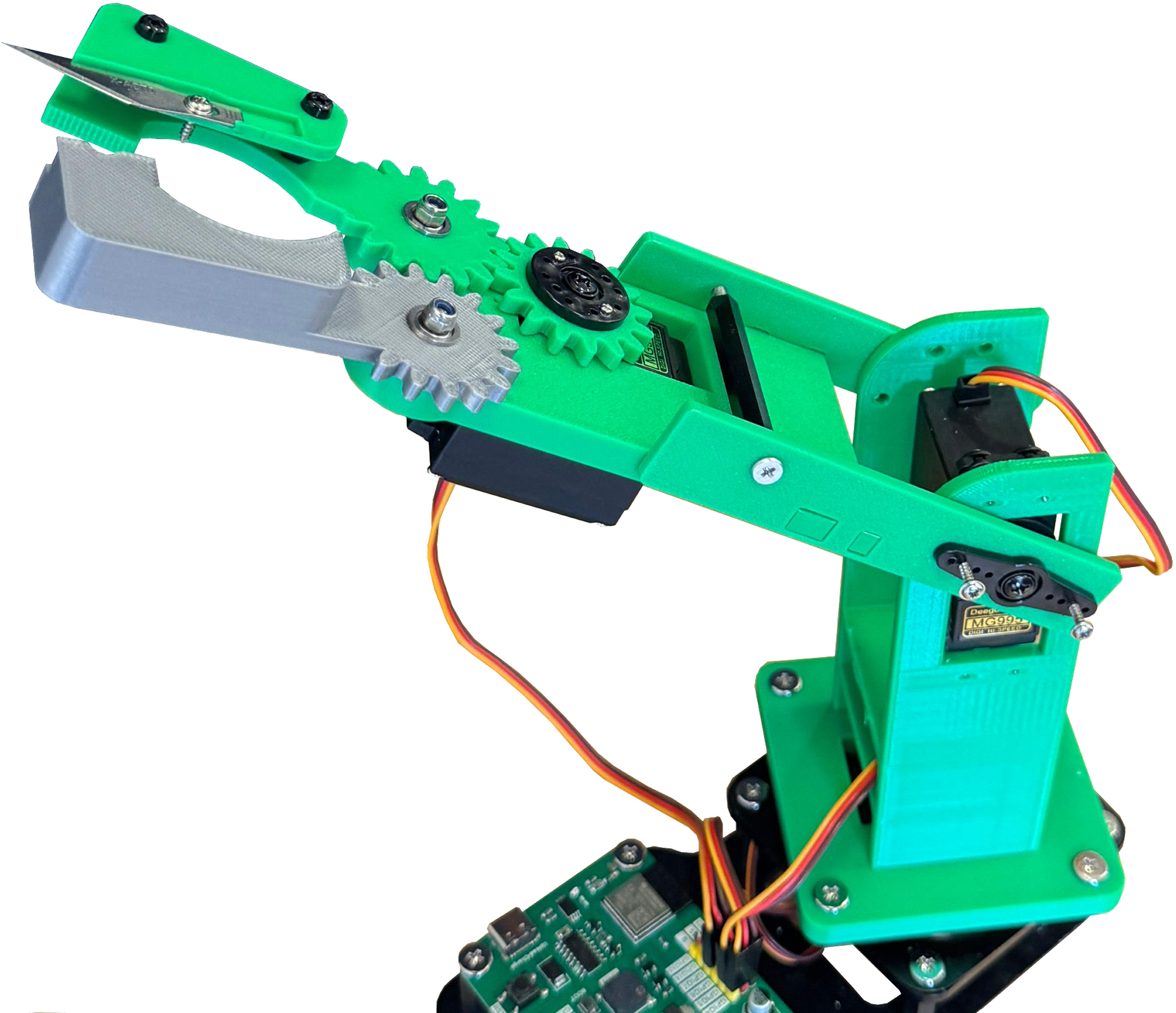
SNIPIT SYSTEM
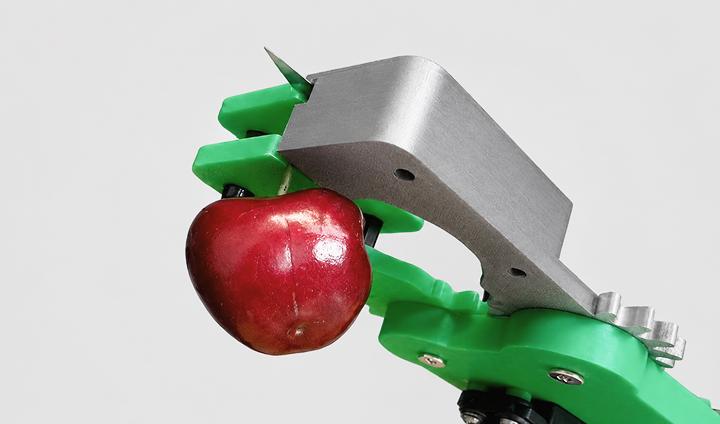
GENTLE GRIPPING
SYSTEM DEMO
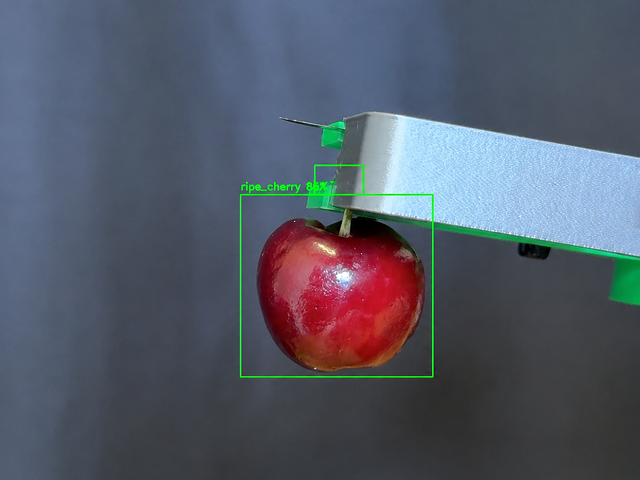
ML DETECTION - CHERRY
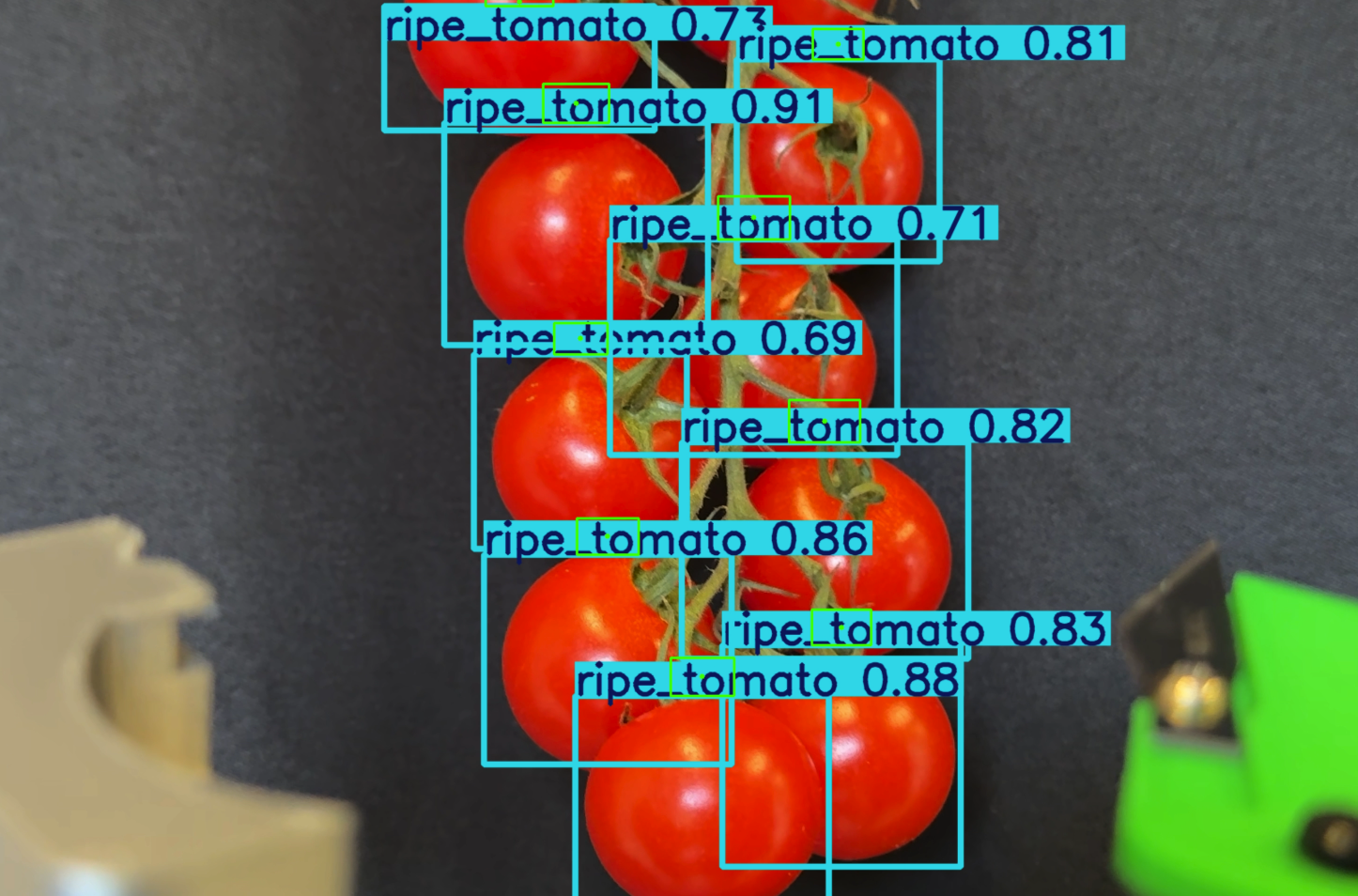
ML DETECTION - TOMATOES
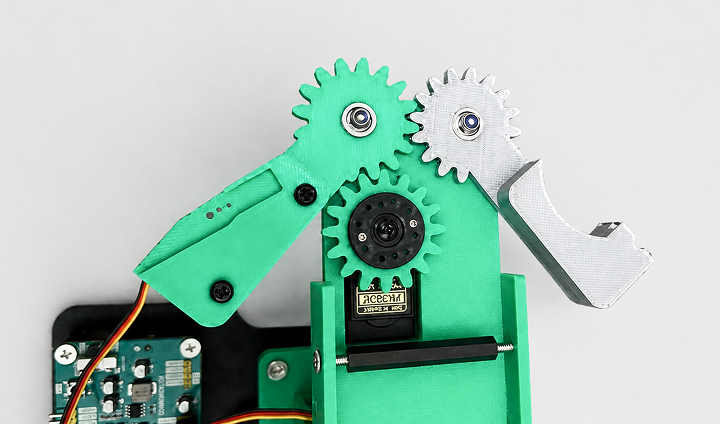
MECHANISM DETAIL
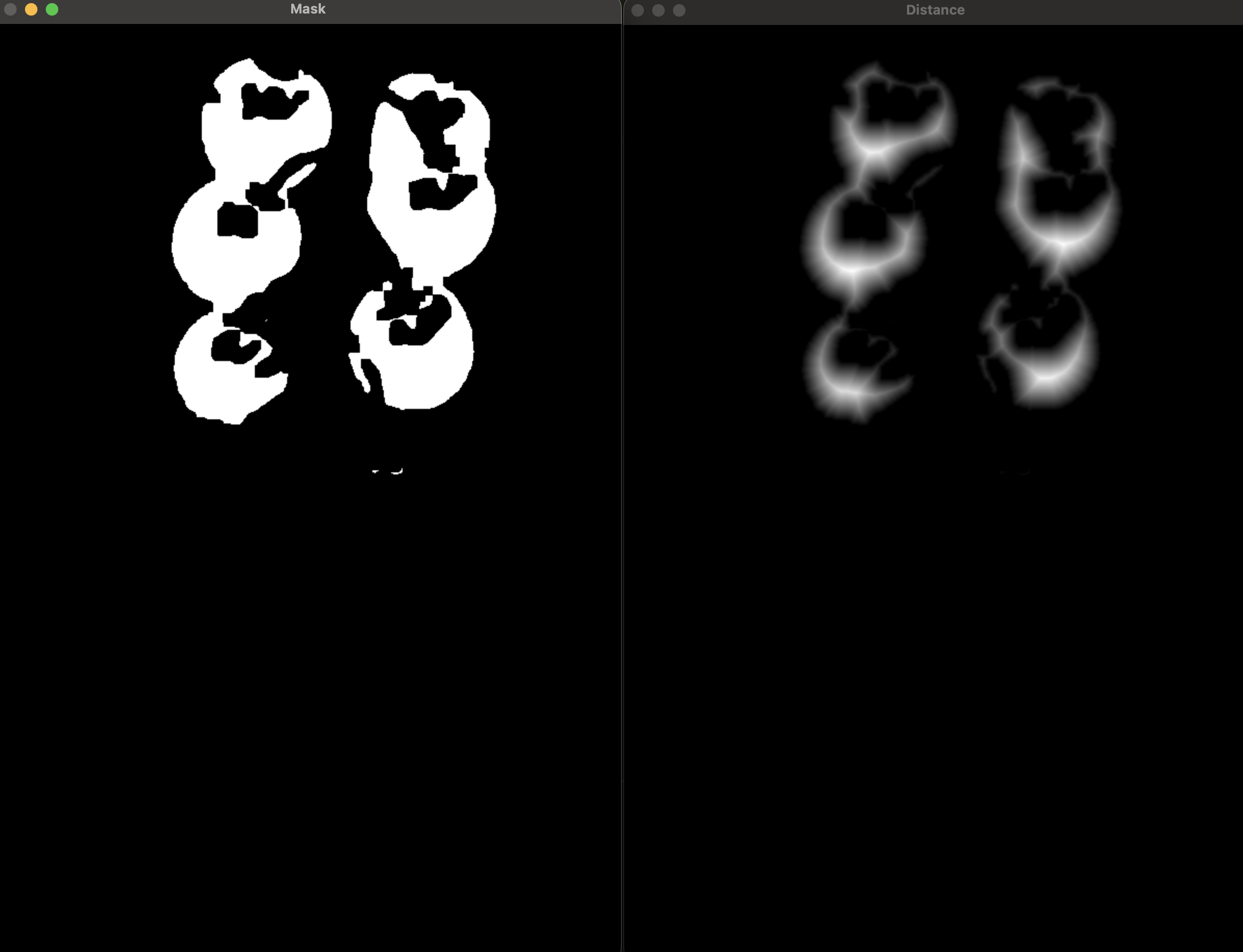
CV PROCESSING
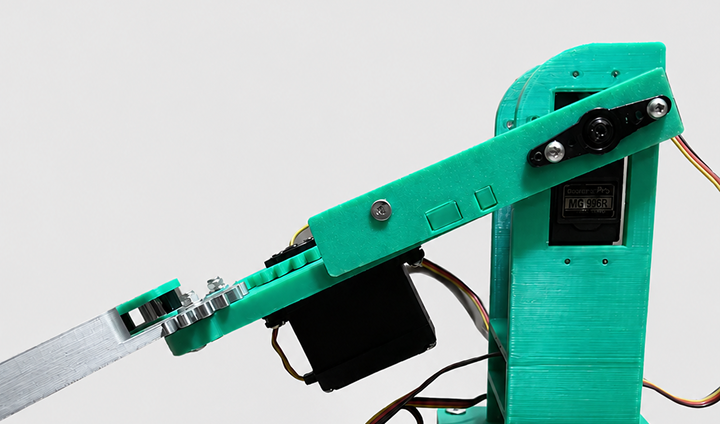
ARM MECHANISM
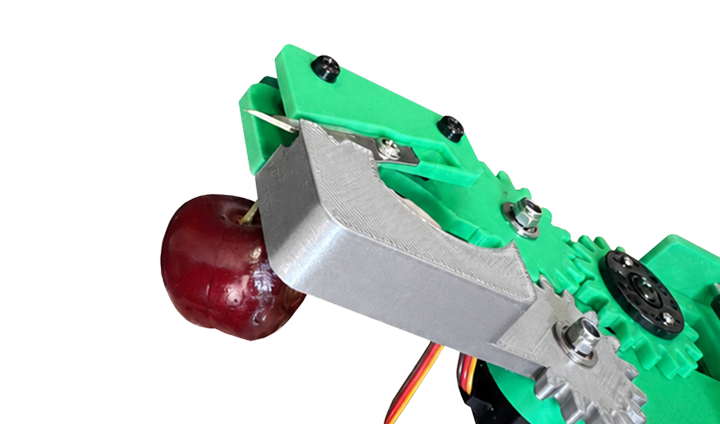
CHERRY HARVEST